


対応ワーク一覧
金属部品の生産ラインで多数の実績
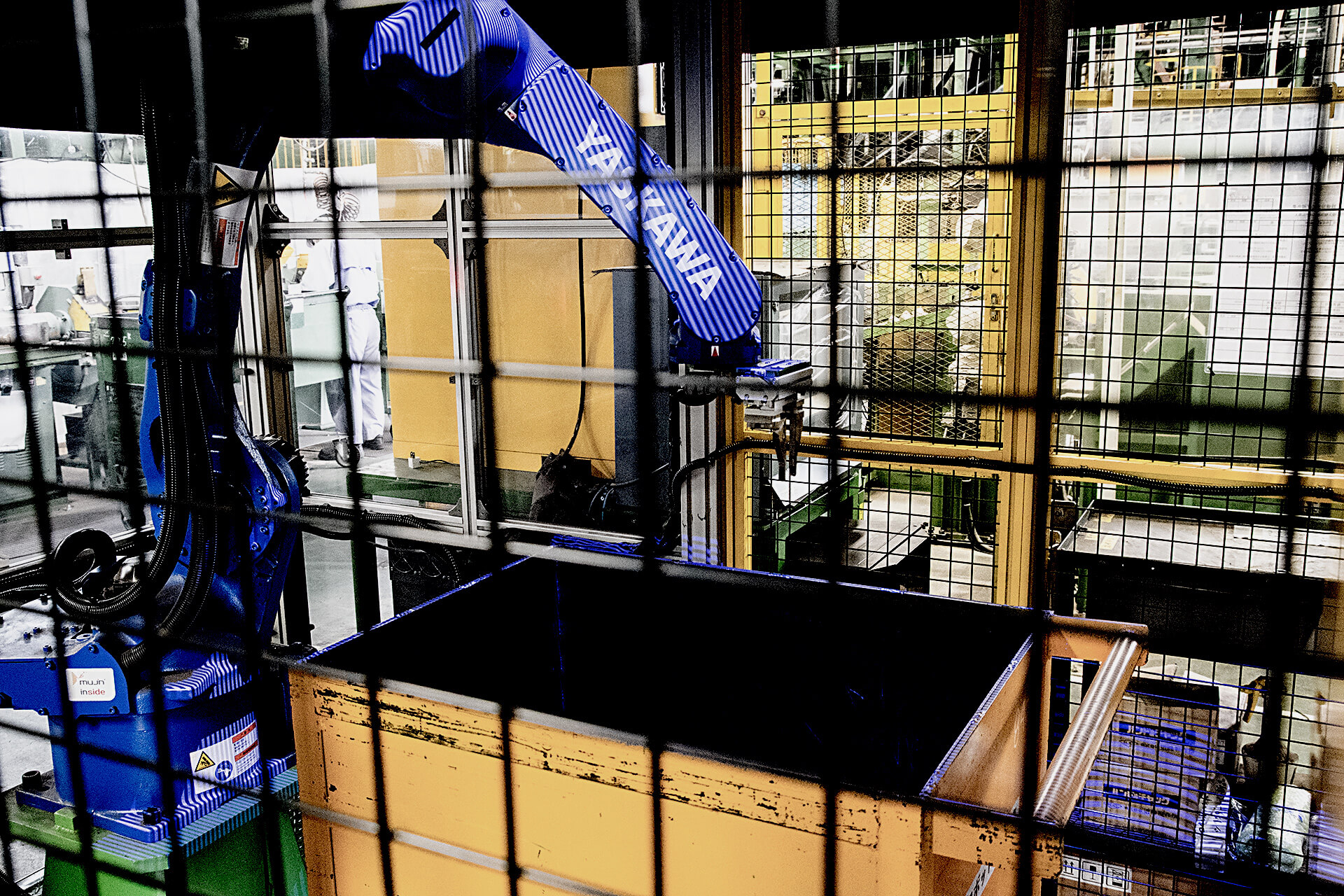
Mujinはシーンに応じて認識・動作・把持を自律的に判断し制御する独自技術により、高難度のソリューションも完全ティーチレスで自動化。取り残しやチョコ停を防ぐための独自機能を多数搭載し、お客様の要求仕様に応える3Dロボットピッキングを実現します。 特に金属部品の製造現場での実績が多く、加工機への部品供給のみならずAGVを活用した工程間搬送の自動化にも対応しています。
工場内物流 (画像クリックで各部品の説明パートへジャンプ)

自動車部品 (画像クリックで各部品の説明パートへジャンプ)
その他の金属部品 (画像クリックで各部品の説明パートへジャンプ)
工場内物流関連
通い箱
関連導入事例



ソリューション概要
通い箱の工程間物流を自動化。 複数品種(サイズ違い、蓋有り無し)の通い箱を搬送できる知能ロボットとAGVの連携により、他工程への部品供給の自動化を実現します。
主な特長(カーソルを合わせると内容が表示されます)
工程間物流
AGV連携
Mujinハンド(通い箱用)
多品種・混載可

自動車部品関連
リングギア
ソリューション概要
リングギアの検査工程への投入を自動化。バラ積み状態からワークの表裏を揃え、且つタクト10秒/個以下の早さで 検査工程へ安定的に送るために反転機と連携させるなどで可能に。これにより省人省力化を実現します。
主な特長(カーソルを合わせると内容が表示されます)
検査工程
高速ピッキング

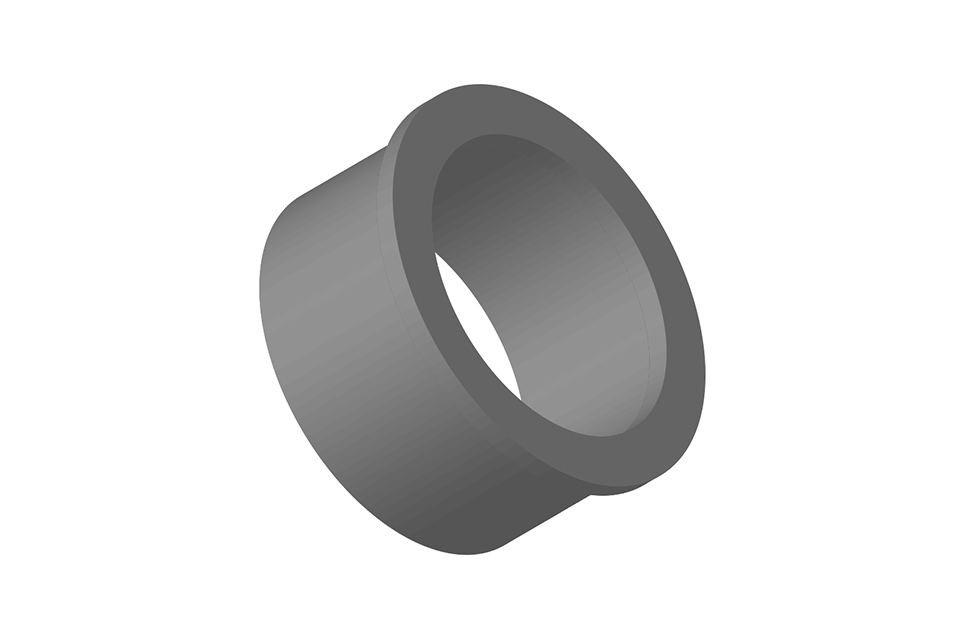
円筒部品
関連導入事例
ソリューション概要
円筒形素材の加工機への投入を自動化。狭小空間でタクト10秒/個以下という高速ピッキングを可能にしたことで、複数台の加工機へ供給し省人省力化を実現します。
主な特長(カーソルを合わせると内容が表示されます)
加工工程
狭小空間
高速ピッキング
複数台供給
自動車用ダイカスト部品
関連導入事例
ソリューション概要
自動車用ダイカスト部品の加工機への投入を自動化。 バラ積み状態から3Dカメラでピッキング、その後2Dカメラで把持姿勢を補正することで、高い位置決め精度でワークを配置させることを実現。 荷姿によっては2Dカメラ連携無しでダイレクトに配置させることも可能。
主な特長(カーソルを合わせると内容が表示されます)
加工工程
準整列
2Dカメラ連携
高精度ワーク配置

ハブベアリング
関連導入事例
ソリューション概要
ハブベアリングの加工工程への投入を自動化。 知能ロボットとロバスト性の高いMujinVisionによりバラ積み状態からピッキングする。それだけでなく、Mujinコントローラで制御された2Dカメラが、ワークの回転位相と表裏を確認した後、ワークを持ち替え、整列台への配置までを同じロボットでティーチレスで対応可能(多能工化)。人手によるピッキングとワークストッカーへの供給作業が無くなったことにより、省人化・省スペース化を実現。
主な特長(カーソルを合わせると内容が表示されます)
加工工程
2Dカメラ連携
多能工化

バルブガイド
ソリューション概要
バルブガイドの組み立て工程への投入を自動化。 狭小空間でタクト10秒/個以下という高速ピッキングを可能にしたことで、品種それぞれに用意していたパーツフィーダーなどの供給ユニットをロボットに置き換えることにより省スペース化を実現。
主な特長(カーソルを合わせると内容が表示されます)
組み立て工程
高速ピッキング
狭小空間

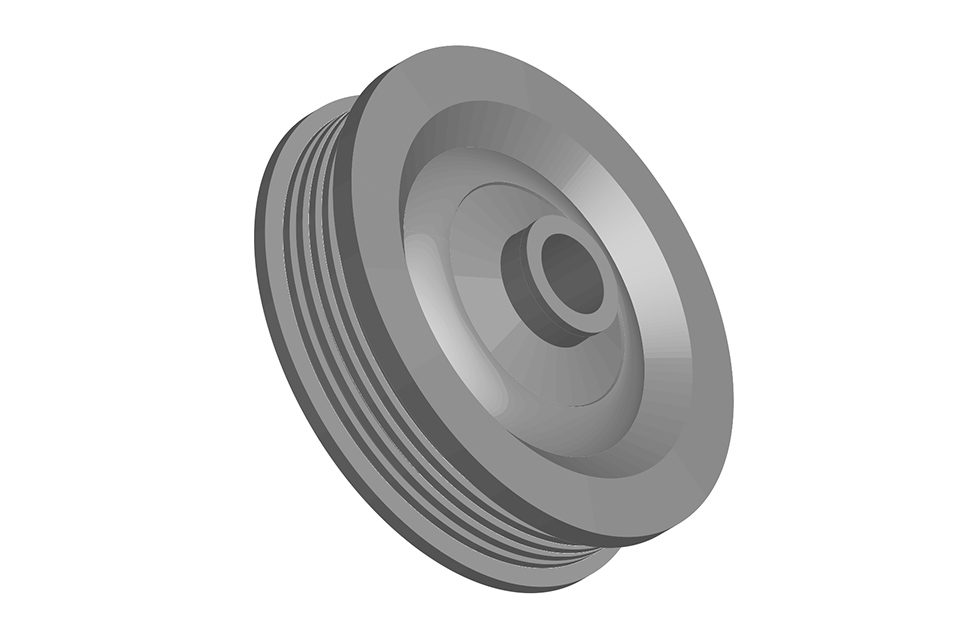
プーリ
ソリューション概要
プーリの加工工程への投入を自動化。 狭小空間でタクト10秒/個以下という高速ピッキングを可能にしたことで、複数台の加工機へ供給し省人省力化を実現。
主な特長(カーソルを合わせると内容が表示されます)
加工工程
高速ピッキング
複数台供給
ナックル
関連導入事例

ソリューション概要
複雑形状且つワーク表面が黒光りするナックルの加工工程への投入を自動化。 チョコ停を防止する多数の機能を備えた知能ロボットとロバスト性の高いMujinVisionによりバラ積み状態からピッキングする。それだけでなく、ワークの表裏判定を合わせて行い、必要に応じて治具上での持ち替えも同じロボットでティーチレスで対応可能(多能工化)。人手によるピッキングとコンベア上への整列作業が無くなったことにより、省人化・省スペース化を実現。
主な特長(カーソルを合わせると内容が表示されます)
加工工程
複雑形状ワーク
黒光りワーク
多能工化

コンロッド
関連導入事例

日本大手自動車メーカー 様
コンロッドの切削工程への投入を自動化。精密な位置決めが必要であったが、MujinからPickWorkerに加え、位置決め機構で速度と精度を両立したシステムをワンストップで納入しました。
ソリューション概要
コンロッドの加工機への投入を自動化。 ピッキングの早さだけでなく、ワークの整列を必要とする場合は、整列機含めたシステムとしてSI対応が可能。 キャップ部分が分かれて2部品で構成される場合は、MujinVisionを2個設けることにより、ロボット1台で交互ピッキングしながら次工程へ供給させることが可能。
主な特長(カーソルを合わせると内容が表示されます)
加工工程
複雑形状ワーク
交互ピッキング
SI対応

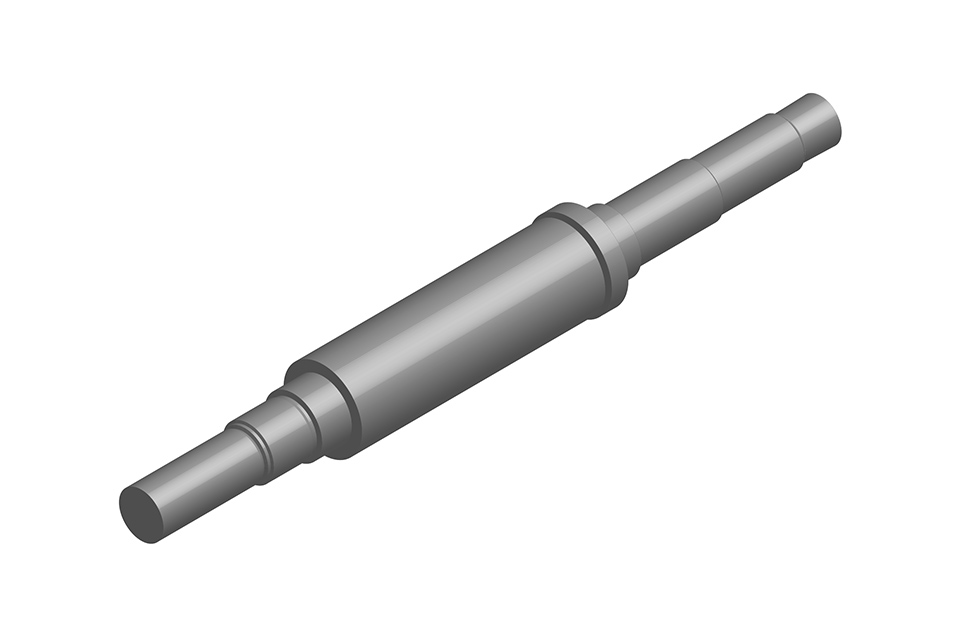
モーターシャフト
ソリューション概要
モーターシャフトの加工工程への投入を自動化。 シャフト部品は、一般的にマグネットハンドが使用されるが磁化するため、加工工程を考慮するとチャックハンドでのピッキングが望ましい。しかし、隣り合うワークが邪魔になりピッキング不可の場合があり取り残しが多くなるという課題がある。そこでシャフト向けMujinハンドを用意。磁化させないピッキングが可能になったことにより、省人化・省スペース化(脱磁スペース不要)を実現。
主な特長(カーソルを合わせると内容が表示されます)
加工工程
Mujinハンド(シャフト用)
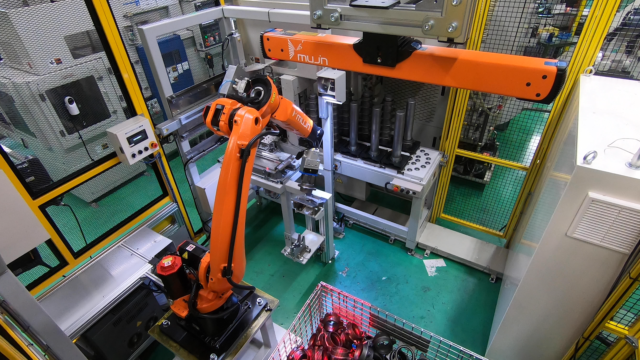
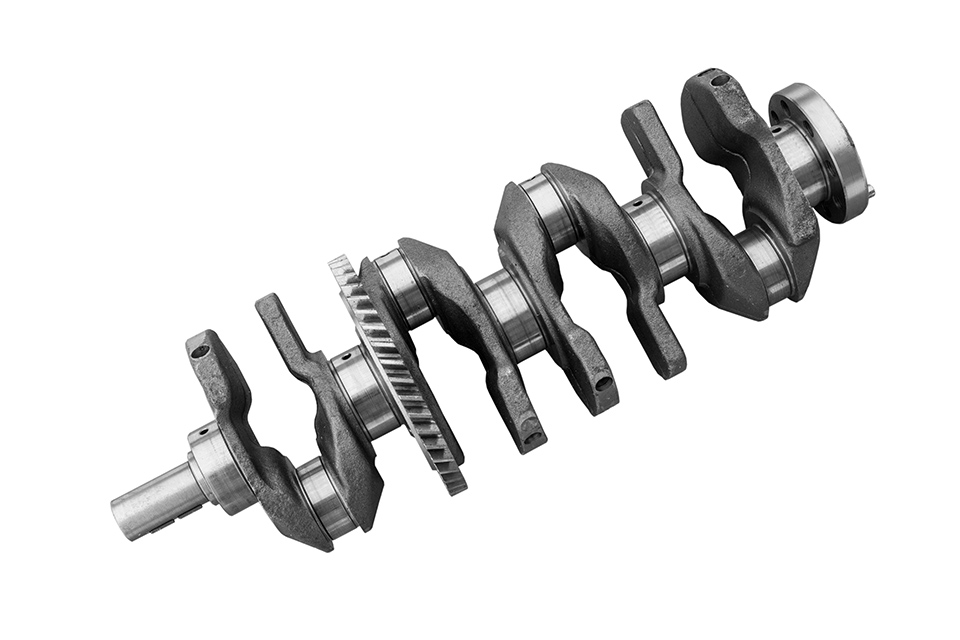
クランクシャフト
ソリューション概要
クランクシャフトの加工工程への投入を自動化。 知能ロボットとロバスト性の高いMujinVisionによりバラ積み状態からピッキングする。単にピッキングするだけでなく、任意のワークの向きと配置姿勢で整列台までの配置動作をティーチレスで行う。人手によるピッキングとワークストッカーへの供給作業が無くなったことにより、省人化・省スペース化を実現。
主な特長(カーソルを合わせると内容が表示されます)
加工工程
複雑形状ワーク
多品種対応
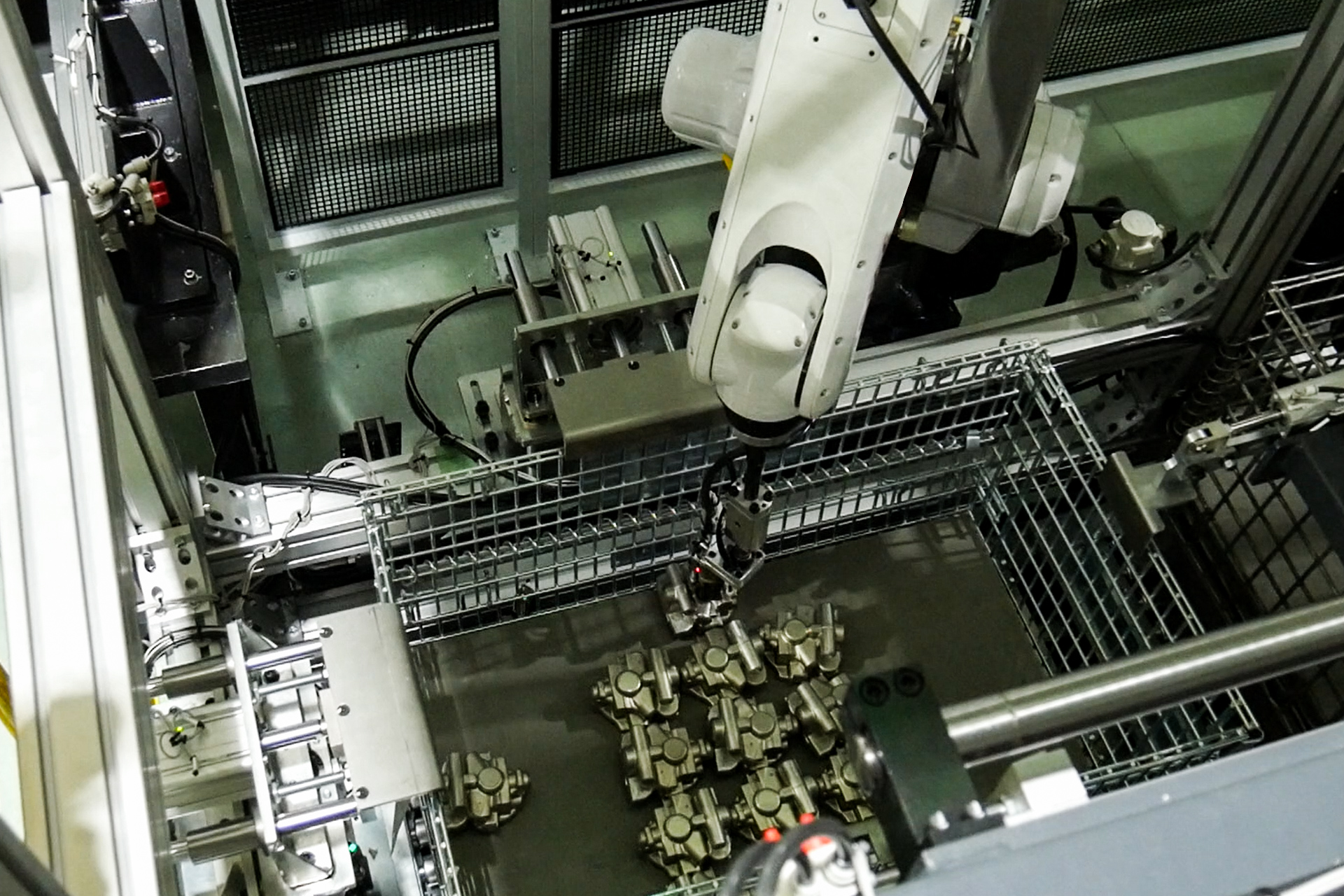
ロッカーアーム
関連導入事例

ソリューション概要
ロッカーアームの加工工程への投入を自動化。 「小型」「複雑形状」という特徴からバラ積みピッキングの難易度は高いワーク。これに対応するために、電動グリッパー式とエアー吸着式の2種類のピッキング方法を可能とする「ダブルハンド」を採用。通常ダブルハンドは干渉を避けるために高度な制御を必要とするが、Mujinコントローラにより制御を自動化し、ティーチレスでロボットを稼働させることを可能に。これにより、部品供給の自動化を実現します。
主な特長(カーソルを合わせると内容が表示されます)
加工工程
複雑形状ワーク
Mujinハンド(ダブルハンド)
多品種

その他の金属部品
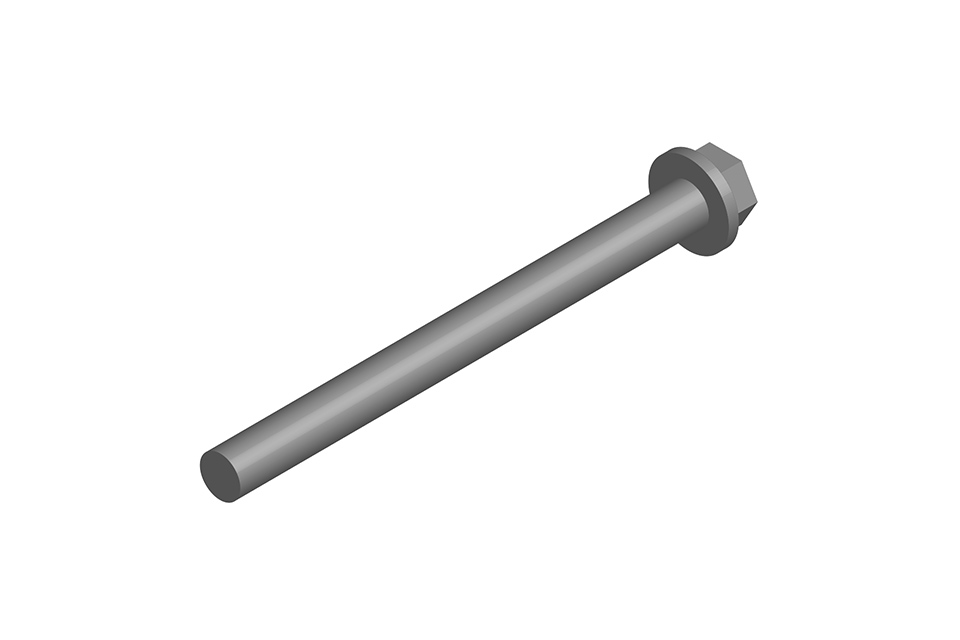
ボルト
ソリューション概要
ボルトの組み立て工程への投入を自動化。
・光沢のあるワーク表面に対してもロバスト性の高いMujinVisionにより安定的なピッキングが可能。
・狭小空間においてもタクト10秒/個以下という高速ピッキングが可能。
主な特長(カーソルを合わせると内容が表示されます)
組み立て工程
高速ピッキング
狭小空間
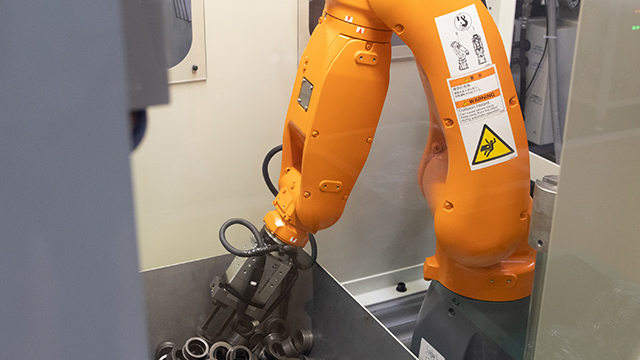
バルブ
関連導入事例
ソリューション概要
バルブの加工工程への投入を自動化。 ・光沢のあるワーク表面に対してもロバスト性の高いMujinVisionにより安定的なピッキングが可能。 ・タクト10秒/個以下という高速ピッキングが可能。 ・同一セルで対品種対応が可能。
主な特長(カーソルを合わせると内容が表示されます)
加工工程
高速ピッキング
複雑形状ワーク
多品種

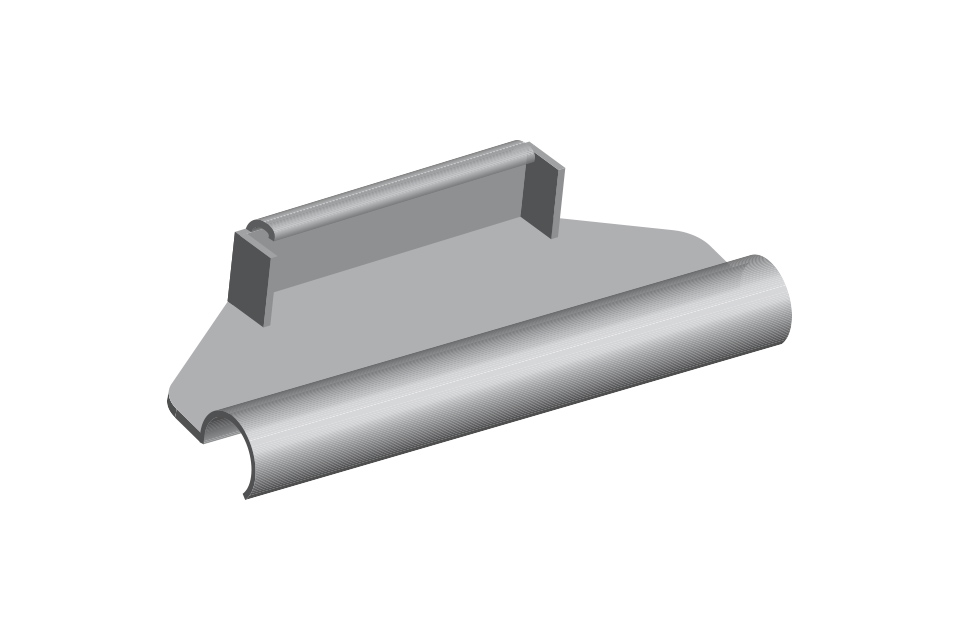
板金プレス部品
ソリューション概要
絡み易い板金プレス部品の加工工程への投入を自動化。 配置先の治具へ正確に位置決めするために、2段階の把持し直しをハンドカメラで実施し実現。
主な特長(カーソルを合わせると内容が表示されます)
加工工程
ハンドカメラ
複雑形状ワーク
2段階把持補正
詳しくはパンフレットをご覧下さい
資料ダウンロード