
テクノロジー
世界で唯一の汎用的産業用ロボット知能化技術
「MujinMI」
産業用ロボットが人の作業を代替するためには、未だに多くの技術的課題が残されており、人の作業をロボットに置き換えた時に採算性や生産性が成立するケースは、単純かつロボットにとって実行しやすい条件が揃った場合に限ります。
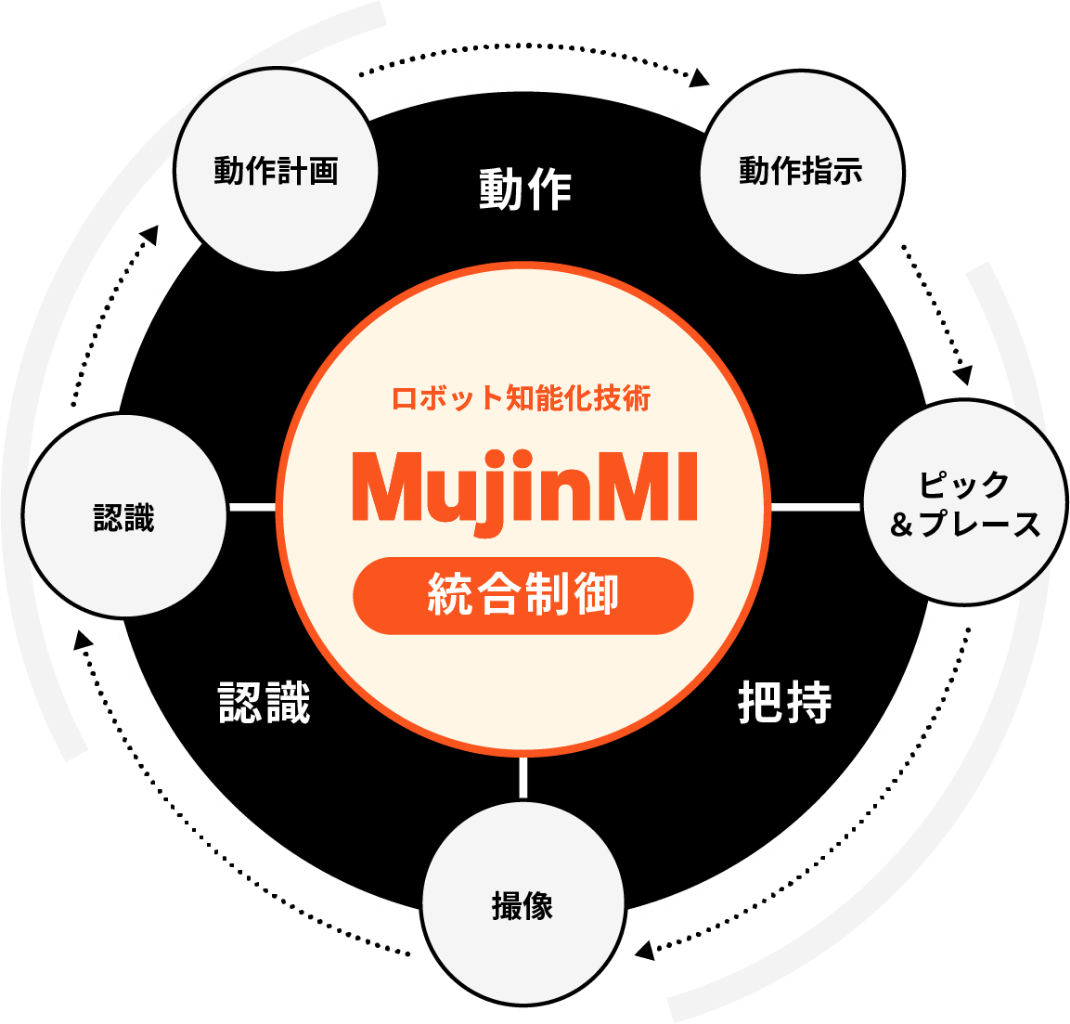
Mujinはこれらの課題を、「認識」「動作」「把持」の高度な制御により、あらゆる産業用ロボットの自動化プロセスを自動化する「MujinMI(Machine Intelligence)」の開発により解決を図っています。
MI:Machine Intelligence(機械知能)とは
一般的に広く言われている「AI(人工知能)」とは、人間を模してつくられる知能のことを指します。人間には感情があり、相手を思いやる心遣いがあり、ものごとを予見して行動し、失敗をしても学んでいく一方で、論理的には破綻した決断をすることや、勘違いや推測でものごとを判断することも珍しくありません。従って、人間を模倣してつくられる知能(AI)では、100%の精度を保証できず、失敗が許されない環境への応用は難しいとされてきました。
Mujinが扱っている「MI(機械知能)」は、機械のための知能です。
人間のように臨機応変に幅広いことをこなすことはできませんが、ある特化した領域において、100%論理的な計算に基づいてタスクを実行します。
「MujinMI」を実現する技術
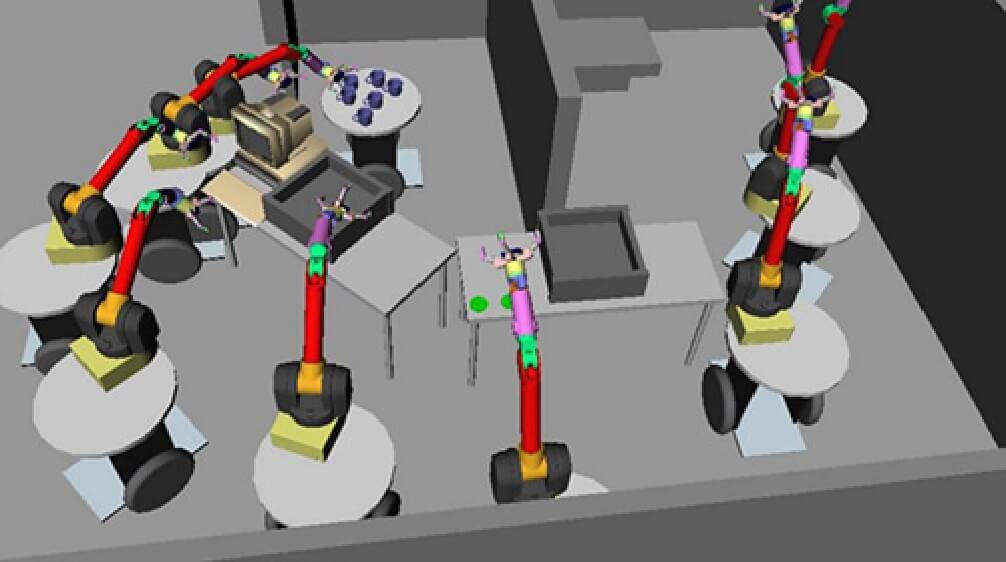
ロボットを選ばない高速解析的逆運動学
(Inverse Kinematics)
従来はロボット毎にそれぞれその順運動学を解くプログラムを作成する事が必要で開発までに多くの時間がかかるのが当たり前でしたが、Mujinの運動学計算ライブラリは各ロボットの逆運動学方程式を解くために全ての例外ケースを考慮する最適なプログラムを生成する事が出来ます。
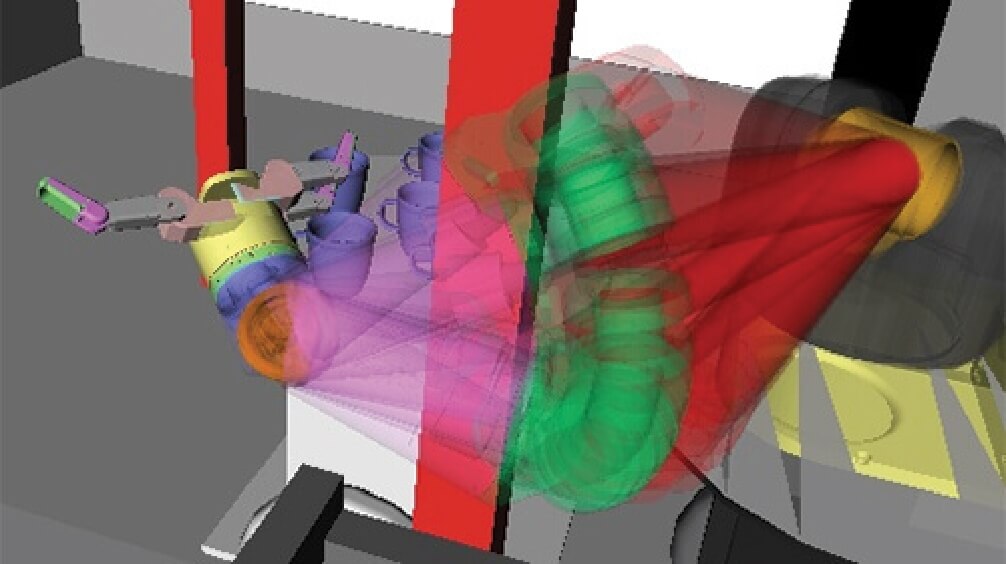
現実世界を考慮出来るモーションプランニング (Motion Planning)
ロボットをティーチングせずに現実世界で動かすには、ただ動かせば良いというわけではありません。現実世界には必ずといっていいほど存在する障害物、関節リミット、特異点、動力学を考慮しながら目的地に到達できて初めて役に立ちます。Mujinの技術を応用する事でロボットを手作業で動かしながらその軌道を記録していた従来のマニュアルティーチング作業はもはや必要なくなります。
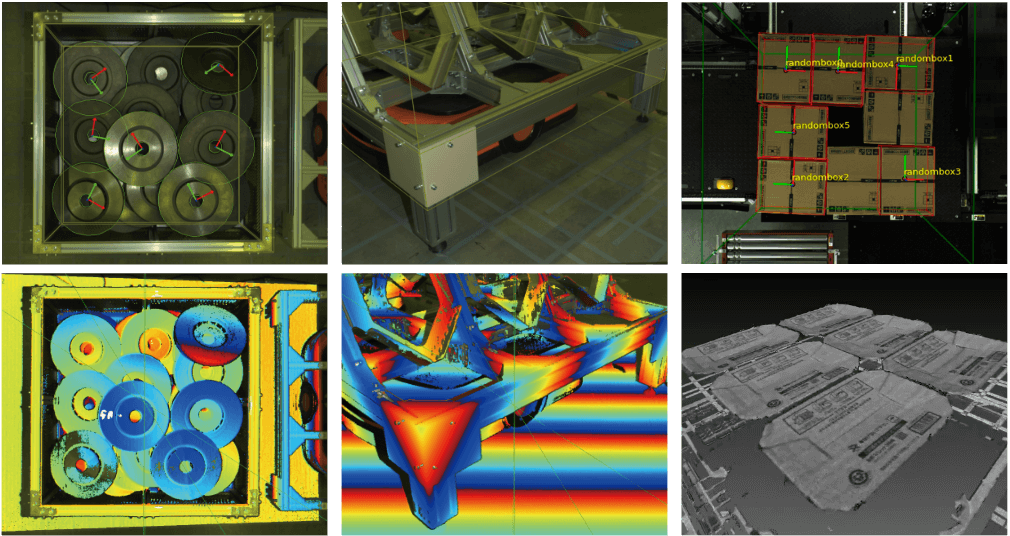
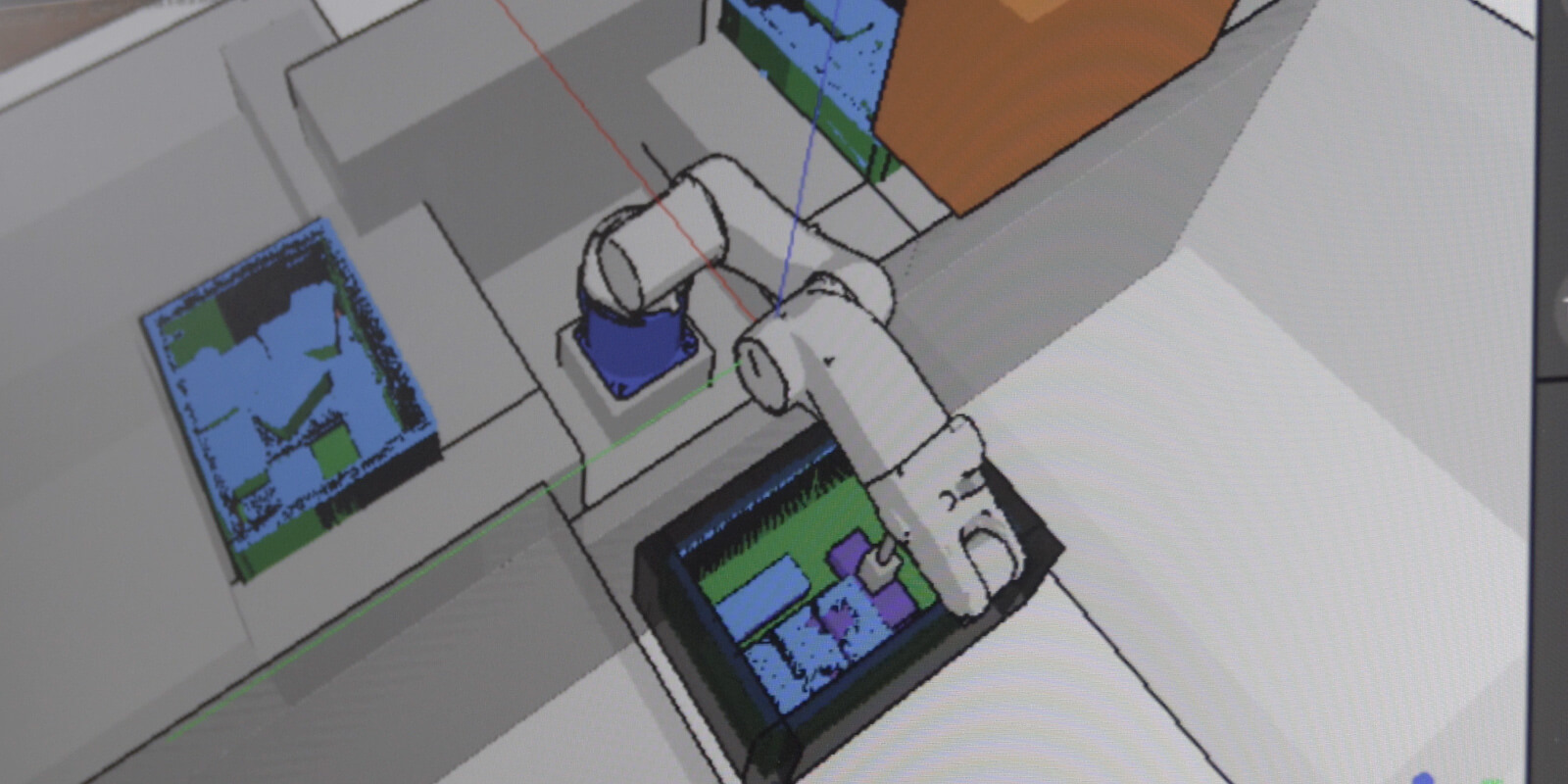
3D認識技術
人間が何か物を掴もうとするとき、“目”は対象物を見つけ出すだけではなく、無意識に「周囲に障害物はないか」「対象物は動いていないか」といったことも感知しています。ロボットの“目”である3Dビジョンシステムにとっても同様で、Mujinは対象物を認識するだけではなく、状況による判断も行う知能視覚アルゴリズムを開発しています。