


News
2024.04.24 ニュースリリース
2024.04.15 お知らせ
2024.04.03 ニュースリリース
2024.03.14 お知らせ
最新導入事例
-

コーナン商事株式会社様
- カテゴリ
- 物流
- ソリューション
- デパレタイズ
詳細を見る
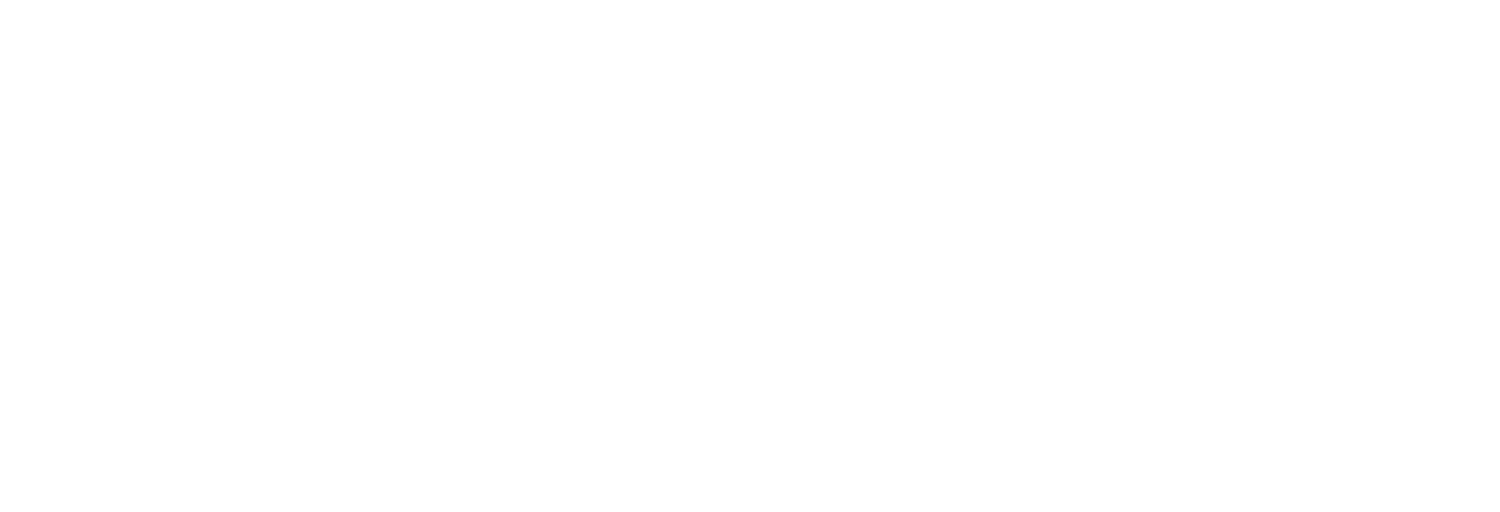
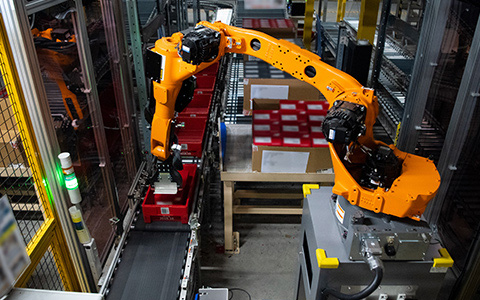
コーナン商事株式会社様
無地ケース対応 混載デパレタイズロボット
ソリューションの特徴
最高速度調整 ワークのサイズ・重さを判別して最適な速度で安定的に荷下ろしを実行します 難認識ワークへの対応 一般的に判別が難しいとされている無地かつ透明テープが貼られたケース商品もMUJIN独自のアルゴリズムで認識可能です 多くの稼働実績 Mujinは多くのデパレタイズロボットの納入実績を持つため、安定して稼働するシステムを提供可能です -

アズワン株式会社様
- カテゴリ
- 物流
- ソリューション
- 折り畳みコンテナ積み付け
詳細を見る
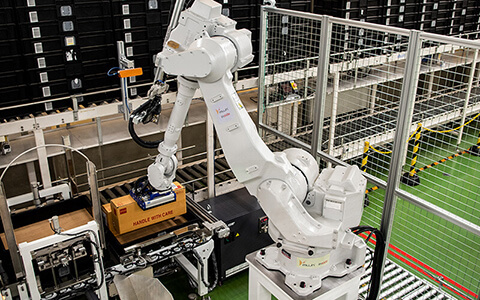
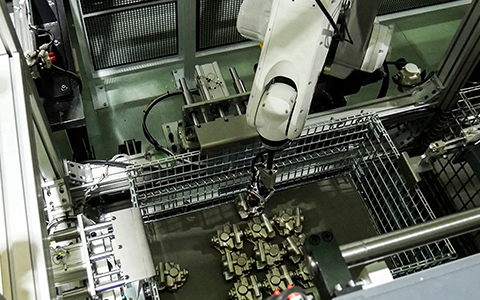
アズワン株式会社様
世界初のオリコン積み付けソリューション
ソリューションの特徴
オリジナルハンド オリコン搬送用に独自開発したハンドが世界初のソリューションを実現 完全干渉回避 カゴ台車本体がロボットの搬送経路を遮っていても決して衝突せずにオリコンを搬送 -
ローム・ロジステック株式会社様
- カテゴリ
- 物流
- ソリューション
- デパレタイズ・積み付け
詳細を見る
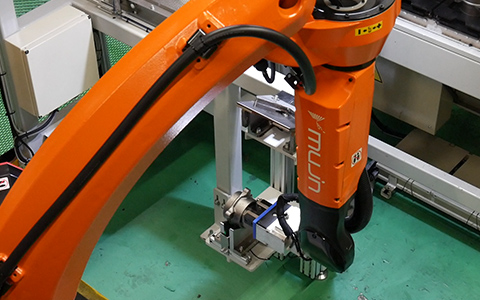
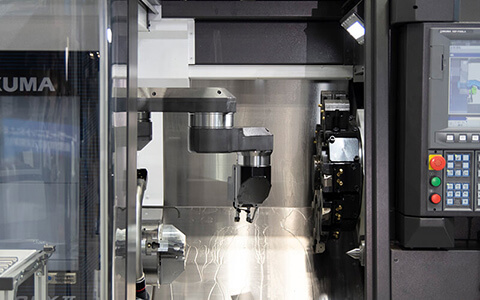
ローム・ロジステック株式会社様
自動倉庫への入庫を自動化
ソリューションの特徴
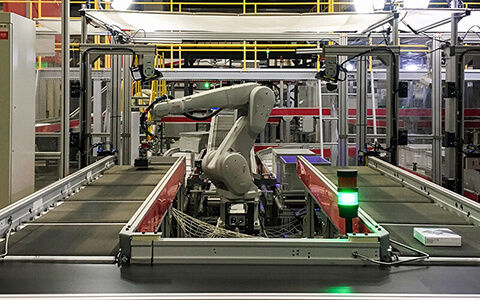
最高難度の自動化ソリューション Mujinのロボット制御技術を結集し実現した自動化ソリューションです 一連の動きで複数の作業 「デパレタイズ→検品→(持ち替え)→積み付け」を一連の動きの中で実行します




















ABOUT US
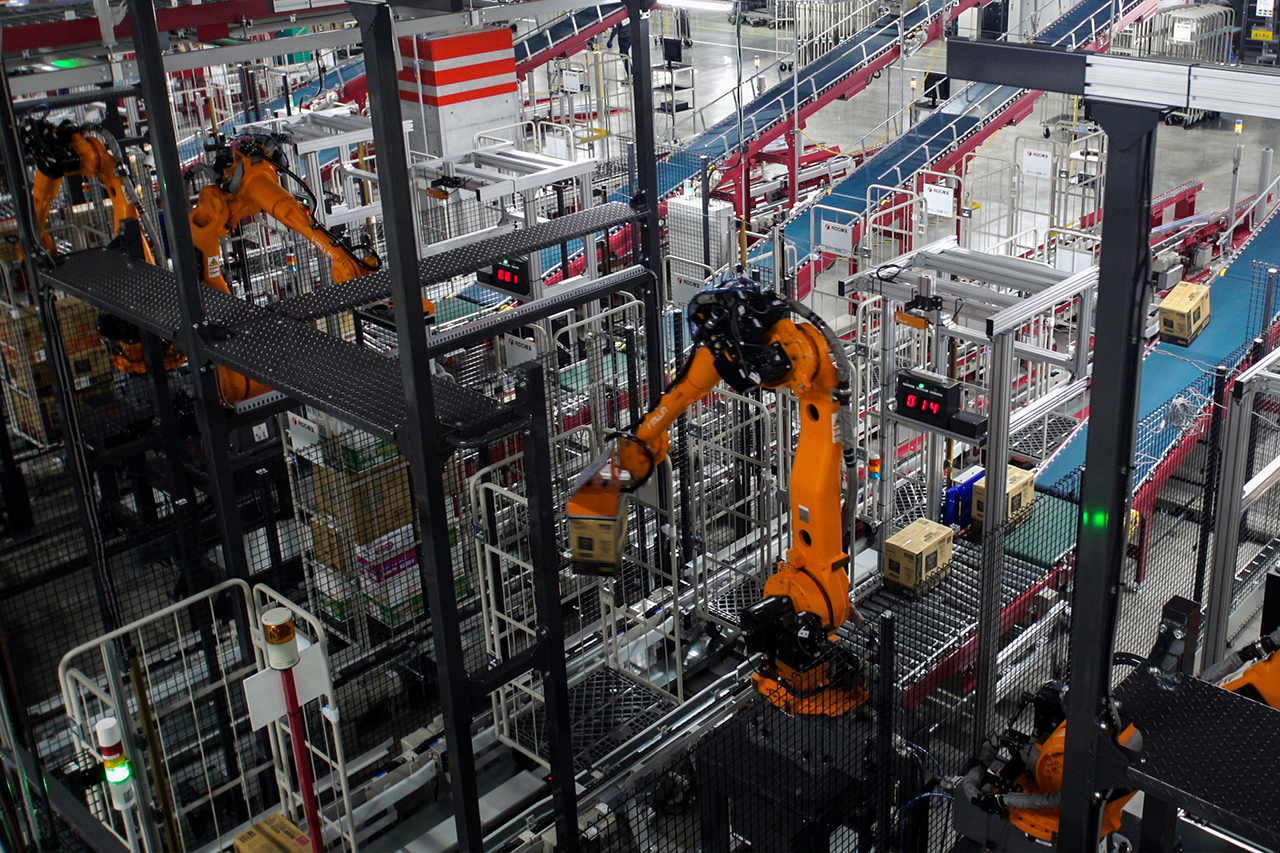
Industrial Robots for Everyone
Mujinは、これまで技術的に難しかった物流・製造現場の作業を自動化する、世界唯一の「汎用的知能ロボットコントローラ」を提供。ロボットの導⼊障壁を解消し普及を促すことで、世界中の⽣産性を底上げし、生活を、社会を、未来を豊かに変えていくことを目指しています。
MujinについてSOLUTION
これまで不可能だった物流・製造現場の自動化を可能にします

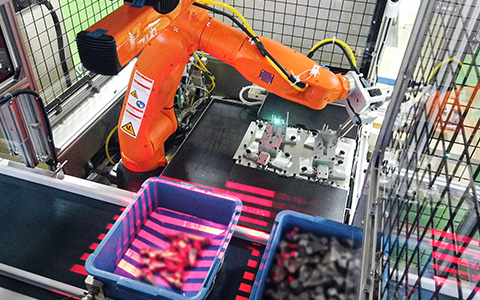
FA向けロボット

モバイルロボット